近日,幸运轮盘 智能微机电系统团队在微型飞行机器人领域取得重要突破,其研究成果《High-thrust ultralight ion wind engine toward controllable aerial microrobots》正式发表于能源领域国际权威期刊《Energy》(中科院一区TOP期刊,2025年影响因子:9.4)。该论文第一作者为幸运轮盘 青年教师陶倩楠,研究生陈挚为联合作者,通讯作者为李巍教授。
论文封面
微型飞行机器人为完成极狭窄封闭环境下的监测、救援等任务提供了潜在途径,但也因此亟需开发小型、高推力密度、低噪声的先进推进系统。较之传统的旋翼、喷气推进系统,离子风推进技术凭借其无运动部件、静音运行,且不产生化学污染的特性,在微型推进领域展现出独特潜力,但已有的离子风推进系统仍面临推力密度不足、可控性低等问题,限制了其在微型飞行平台中的实际应用。
针对上述挑战,研究团队基于多物理场耦合仿真技术,设计并优化了一种基于针-板电极构型的多单元离子风推进系统,完成了推力性能与流场特性的分析和实验验证工作,研制了利用多单元离子风推进系统实现飞行和调姿的微机器人样机。所开发的离子风推进器单体重量仅18.1mg,推力0.66mN,单位体积推力达到261N/m3,推重比达到3.7。同时,团队开发的离子风推进器产生的离子风流束集中,有效克服了推进器在微机器人狭小空间内的气流干扰问题,为系统的集成与独立控制提供了关键优势。研究团队设计并制造了由多个优化引擎驱动的微型机器人原型,通过独立控制各单元,已可实现稳定起飞与飞行姿态调节,是离子风推进在微型机器人领域的关键技术突破与应用实例。
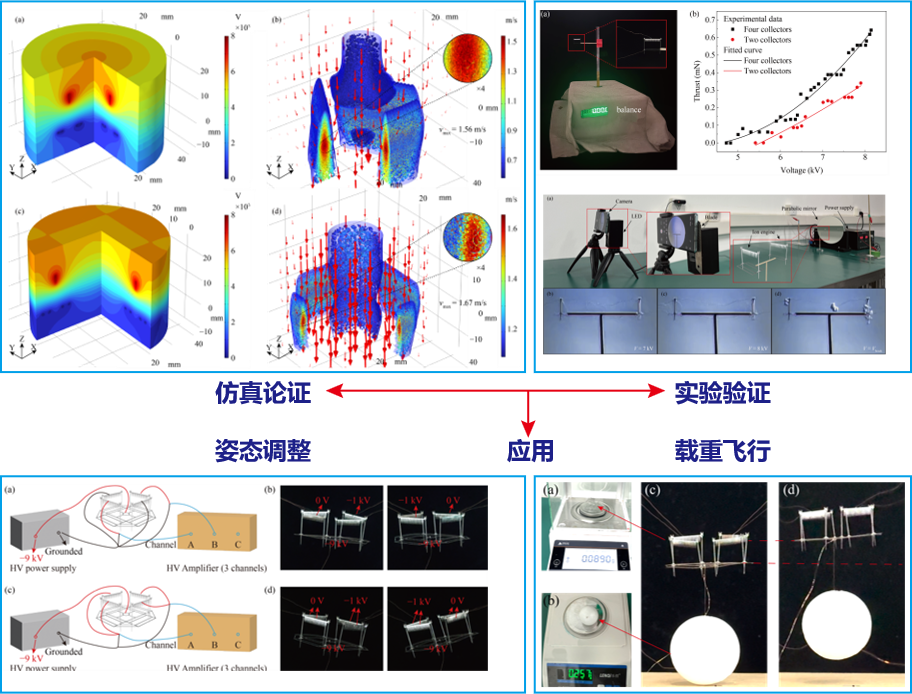
微型离子风推进器的仿真研究、性能实验及实际应用
本研究在微型推进器上取得的进展,是幸运轮盘 近年来基础研究与工程能力持续攀升的又一有力体现。该项成果是幸运轮盘 践行学科交叉、科研创新与产教深度融合的成功范例。研究团队融合了微机电、流体力学与控制科学等多学科知识,在攻克离子风推进核心难题的过程中,成功探索出一条以前沿科学问题为牵引、以跨学科团队为支撑、以实际应用为导向的人才培养新路径。
该项研究得到了未来信息学科交叉中心学科交叉研究项目、国家自然科学基金海外优青项目、江苏省特聘教授计划的支持。
原文链接://doi.org/10.1016/j.energy.2025.139027。
撰稿:陶倩楠 编辑:吴中慧 审核:张吉良

